



Разработка технологий обследования морского дна гидролокационными методами ведется в Институте океанологии им.П.П.Ширшова Российской Академии наук (ИО РАН) на протяжении почти 30 лет.

Одни из первых геоморфологических исследований с использованием гидролокатора бокового обзора были осуществлены на Белом море в 1974г. Более поздние работы связаны с глубоководными исследованиями и поисковыми работами в различных районах Мирового океана и разработками соответствующей техники. Для этих целей в Лаборатории гидролокации дна (ЛГД) ИО РАН был создан ряд гидролокационных приборов, подводных аппаратов, комплексов, методик проведения глубоководных работ и исследований.
Специалисты ЛГД ИО РАН приобрели солидный опыт в проектировании, изготовлении и эксплуатации океанологической гидролокационной техники и глубоководных аппаратов. В последнее время акцент в разработках технологии гидролокационного обследования дна сместился в область создания средств и методик для работ и исследований на шельфе, морском мелководье и во внутренних водоемах.
Технологии гидролокационного обследования дна водоемов, разработанные в Лаборатории применяются для решения следующих научных и прикладных задач:
- поиск необольших объектов на дне;
- картирование распространения геологичеких и биологических объектов (например колонии моллюсков);
- определение планового и высотного положения, а также контроль состояния подводных кабелей и трубопроводов;
- обследование и контроль состояния подводных частей гидротехнических сооружений;
- поиск затонувших судов и самолетов;
- геологические, гидрографические и экологические исследования и изыскания;
- обследование трасс прокладки подводных кабелей и трубопроводов.
Аппаратурное оснащение
В настоящее время ЛГД обладает четырмя основными аппаратурными гидролокационными комплексами, системами обработки и прграммным обеспечением, которые используются для решения задач ИО РАН в области фундаментальных исследований и для выполнения контрактных работ:

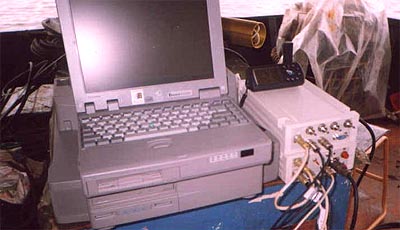
На переднем плане носитель антенн высокочастотного гидролокатора бокового обзора, предназначенный для жесткого крепления к борту плавсредства. В центре двухканальный аналоговый приемопередатчик. Справа устройство отображения гидролокационной информации на базе ПЭВМ. Слева приемник космической системы навигации.
Технические характеристики МКС:
Гидролокатор бокового обзора- рабочая частота - 240 кГц,
- разрешающая способность по дальности - 0,3 м,
- максимальная дальность действия на каждый борт соответственно - 150 м
- рабочая частота - 190 кГц,
- длительность зондирующего импульса - 0,5мс
Общие характеристики МКС:
- скорость движения (буксировки) - до 7 узлов,
- масса подводного носителя - 3 кг,
- габариты судового электронного блока 65х260х280мм
- электропитание - 12 В, 50 Вт.
Гидролокатор бокового обзора и эхолот - характеристики аналогичны МКС

- рабочая частота - 4.5 кГц,
- электрическая мощность в импульсе - 2000 Вт
- длительность зондирующего импульса - 0.2/0.4/0.8 мс
- раскрыв основного лепестка характеристики направленности антенны на уровне половинной мощности - 60
- глубина буксировки подводного носителя - до 60 м,
- скорость буксировки - до 7 узлов,
- масса подводного носителя - 10 кг,
- габариты судового электронного блока 60х260х310мм
- электропитание - 12 В, 500 Вт
 |
 |
|
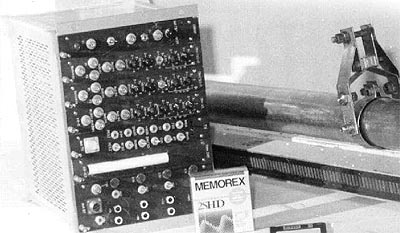
Судовая часть гидролокационной системы. Слева - цифровая система сбора и отображения информации на базе ПЭВМ со встроенным модулем ввода-вывода РАСТР; система работает под управлением оригинального программного обеспечения реального времени РАСТР; справа - аналоговый электронный блок системы МИКРОСАУНД
|
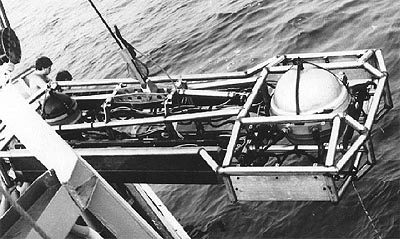
Блок антенн акустического профилографа и эхолота системы МИКРОСАУНД. Антенны установлены на штанге, которая жестко крепится к борту судна.
|

Технические характеристики системы МЕЗОСКАН
Гидролокатор бокового обзора
- рабочая частота
(левый борт/правый борт) - 78/82 кГц - максимальная дальность действия на один борт - 1000 м
- длительность зондирующего импульса - 0,2/1,0 мс
- направленность - 0.7х60
Акустический профилограф
- рабочая частота - 4.5 кГц
- длительность зондирующего импульса - 0.25/0.5 мс
- излучаемая мощность - 2000 Вт
- направленность - 50
Общие характеристики
- размеры буксируемого носителя - 1940x260x220 мм
- масса буксируемого носителя - 55 кг
- рабочая глубина - до 2000 м
- длина буксирного кабель-троса - до 4000м
- скорость буксировки - 2-5 узлов
- габариты судового электронного блока - 500x400x150 мм
Технические характеристики глубоководного буксируемого аппарата "Звук-Л"
Гидродокатор бокового обзора - технические характеристики аналогичны системе МЕЗОСКАН
Акустический профилограф - технические характеристики аналогичны системе МЕЗОСКАН
Эхолот - технические характеристики аналогичны системе МИКРОСАУНД
Общие характеристики
- максимальная рабочая глубина - 6000 м
- масса - 380 кг
- длина буксирного кабеля - до 10 км
- тип кабеля - одна коаксиальная пара
- скорость буксировки - 2-3 узла
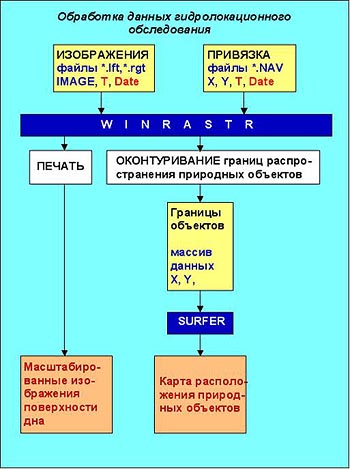

Программа WINRASTR - основная программа постобработки информации, получаемой с помощью гидролокатора бокового обзора, акустического профилографа и эхолота и, которая в сути своей позволяет привязать к координатам каждую точку гидролокационных изображений и профилей, собранных и записанных с помощью программы RASTR.
Программа WINRASTR позволяет просматривать сохраненные изображения поверхности и профилей дна, на экране ПЭВМ и создавать их масштабированные изображения, скорректированные на наклонную дальность и скорость движения.
Эти изображения могут быть экспортированы в файлы *bmp, либо выведены в виде твердых копий на любом из имеющихся стандартных устройств, таких как лазерные, струйные принтеры и графические самописцы.
При просмотре изображений с использованием программы WINRASTR предусмотрена возможность создания текстовых файлов координат профилей дна, контуров областей и точечных объектов, видимых на изображении
